Kalibration des Video-Positionierungs-Systems |
  
|
Kalibration des Video-Positionierungs-Systems |
|
Bevor Sie die Funktion des Video-Positionierungs-Systems verwenden können, müssen Sie dieses zunächst kalibrieren. Hierzu gehen Sie wie folgt vor:
1.Starten Sie den Kalibrierungsdialog unter "Einstellungen > Kalibration des Video-Positionierungs-Systems".
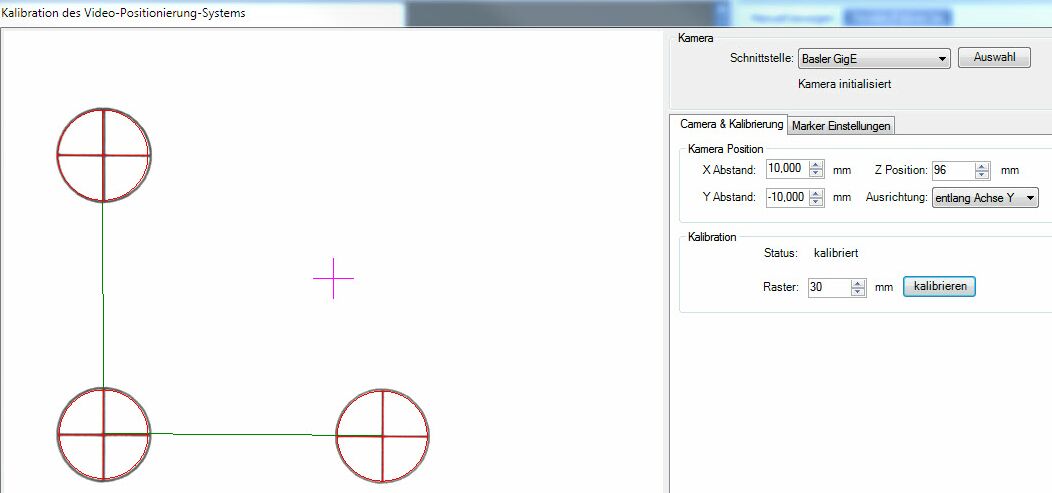
Abbildung: Kalibrierungsdialog
2. In der Schnittstelle muss als erstes die Kamera gewählt werden.
3. Drucken Sie sich ein Blatt aus, auf dem drei Markierungspunkte mit gleichem Abstand zueinander aufgedruckt sind (eine Vorlag hierzu finden Sie im Programmverzeichnis). Positionieren Sei das Blatt so unter der Kamera, dass die drei Punkte in der Mitte des Anzeigefensters zu sehen sind.
4. Unter "Marker-Typ" legen Sie fest welche Form der Marker hat. Bei den, in der Abbildung verwendeten Marker handelt es sich um den Typ "Kreis + Linie" (exaktere Variante). Mit dem Radius geben Sie die Größe des Kreises an. Die andere Option wären drei schwarze Punkte.
5. Sie müssen nun den Abstand der Marker in das Feld "Entfernung vom Objekt" unter "Marker-Abstand" eintragen.
6. Tragen Sie die Werte für die Kamera Position ein (Abstand der Kamera zum Fräser in X und Y).
7. Positionieren Sie nun die Kamera durch manuelles Verfahren der Z-Achse so, daß Sie ein scharfes Bild erhalten (die Kamera verfügt über keinen Auto Focus). Anschließend übertragen Sie den Z-Abstand zum Material in das Feld "Z Position".
|
Bei Änderung der Materialstärke muss auch der Wert für "Position Z" angepasst werden, da sonst das Bild der Kamera unscharf ist und die Erkennung nicht funktioniert. |
8. Unter "Marker-Erkennung Einstellungen" können Sie noch Feineinstellungen vornehmen, um das Erfassungsergebnis der Kamera zu verbessern. Es gibt folgende Einstellungen:
Schwelle - Dieser Parameter definiert wie die Linien sichtbar sein müssen damit sie erkannt werden können. Je kleiner der Wert desto besser sichtbar können die Linien sein. Allerdings kann das zur Falsch Interpretation führen. Je höher der Wert, desto weniger kann von der Linie sichtbar sein. Dann werden nur die am besten sichtbaren Linien erfaßt.
Min. linienlänge - Hier wird die minimale Linienlänge definiert. Die erkannten Linien, die unter der angegebenen min. Linienlänge liegen werden ignoriert. Je kleiner der Wert, desto kürzere Linien werden für die Ermittlung genommen.
Max Linien Lücke - Definiert maximale Lücke auf der gleichen Linie, um sie als eine einzige Linie zu behandeln. Wird die Lücke größer als max. Linien Lücke, dann sind das 2 Linien.
9. Starten Sie nun den Kalibrierungsvorgang, indem Sie unter "Kalibration" den "Kalibrieren" Button betätigen. Es sollten nun drei rote Fadenkreuze erscheinen, die deckungsgleich mit Ihren Markierungspunkten und durch zwei grüne Linien verbunden sind (es sollte wie ein L aussehen). Ist dies der Fall, dann ist die Kalibrierung abgeschlossen.
Sie können nun den Kalibrierungsdialog schließen.
|
Bitte achten Sie darauf, dass genügend Licht vorhanden ist und der Ausdruck eine hohe Qualität hat, da sonst die Markierungspunkte von der Kamera nicht gut erfasst werden können. |
Ausmessen des Kameraoffsets :
Zum Ausmessen des Kameraoffsets legt man ein dünnes Material auf die Fräse, und je nach eingesetztem Arbeitsgerät, taucht man entweder mit dem Messer oder der Fräse nur kurz in das Material um so eine Markierung zu erzeugen. Anschließend setzt man die relativen Koordinaten auf Null und fährt die Z-Achse in die Kamerapositionshöhe. Nun mit X- und Y-Bewegung den Kopf soweit bewegen, bis das Fadenkreuz genau auf der Markierung liegt. Die angezeigten Werte für RX und RY entsprechen dann dem Kameraoffset.